

300.000 KD
FLASHFORGE Adventurer 3 3D printer
FlashForge Adventurer 3: New generation, smart, light Nozzle: fully upgraded; steady filament loading; fast heating up to 200°C (392°F) in 50 se...
View full details
FlashForge Adventurer 3: New generation, smart, light Nozzle: fully upgraded; steady filament loading; fast heating up to 200°C (392°F) in 50 se...
View full details

Adventurer 4, supporting large volume printing, auto leveling, and supporting multiple-machines controlled in one computer, better catering for pri...
View full details

PLA Filament Introduction PLA (Polylactic Acid) filament is one of the most widely used materials for 3d printing. Due to its low cost, easy to pri...
View full details
 Save 16%
Save 16%
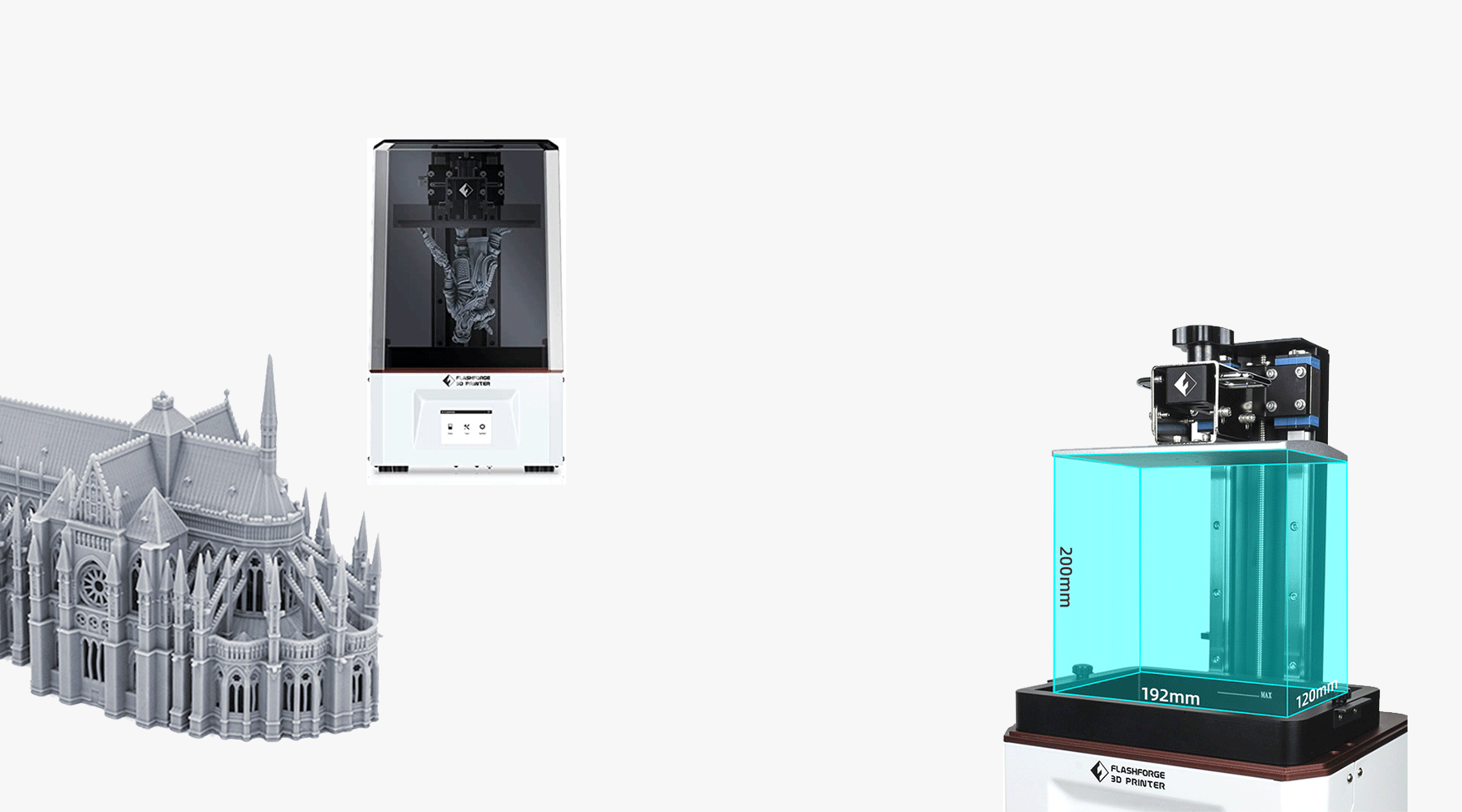
8.9-inch LCD monochrome screen 4K HD resolution for more accuracy Longer lifespan & large build volume Specifications Printing Layer ...
View full details

Introduction Keyestudio Arduino super learning kit MEGA is suitable for Arduino enthusiasts. This kit includes 32 projects with detailed tutori...
View full details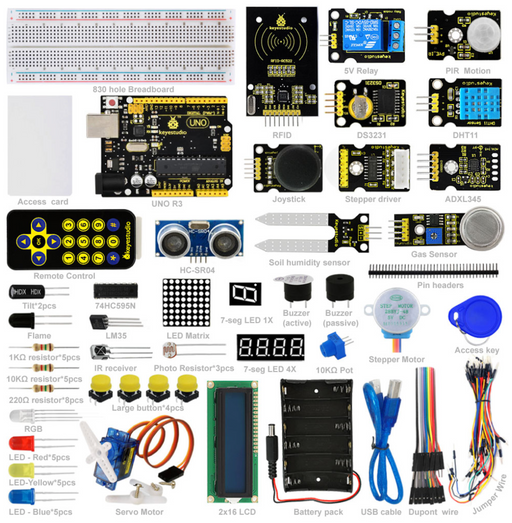

Introduction Arduino super learning kit walks you through the basics of using the Arduino in a hands-on way. You'll learn through building several...
View full details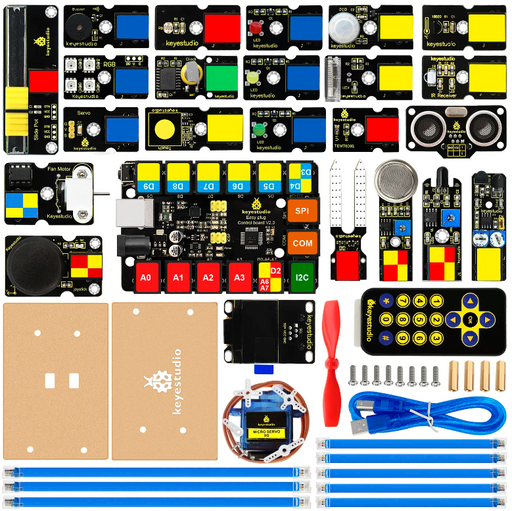
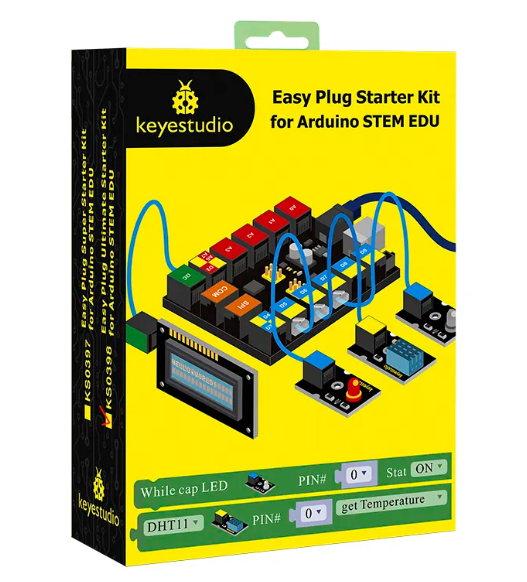
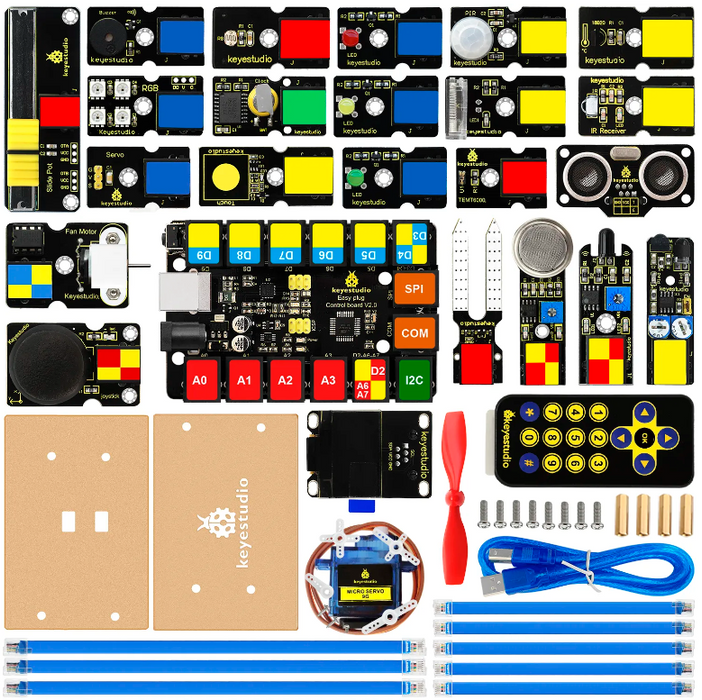
The keyestudio EASY PLUG ultimate starter kit is based on Mixly blocks coding, very easy to use and flexible. This kit includes everything you need...
View full details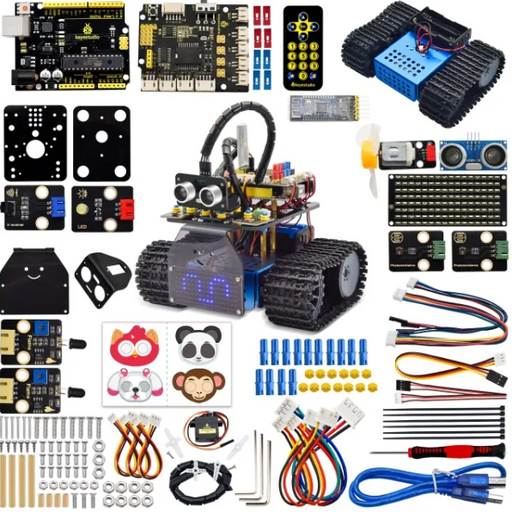
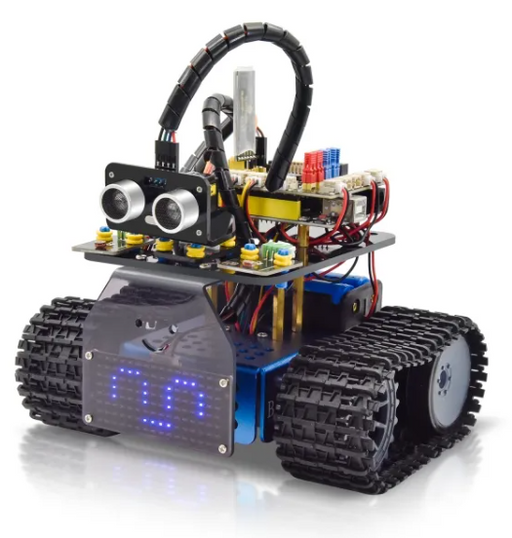
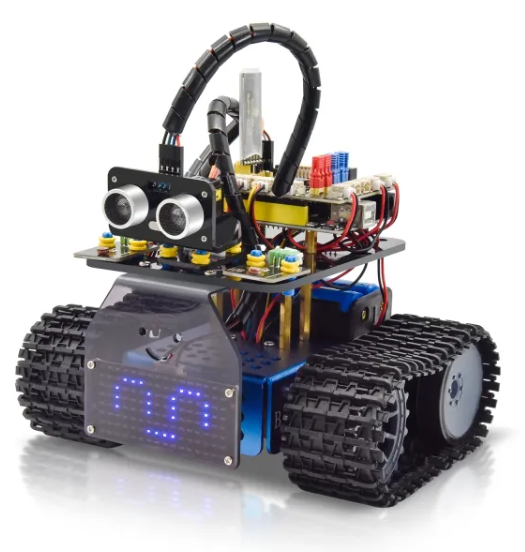
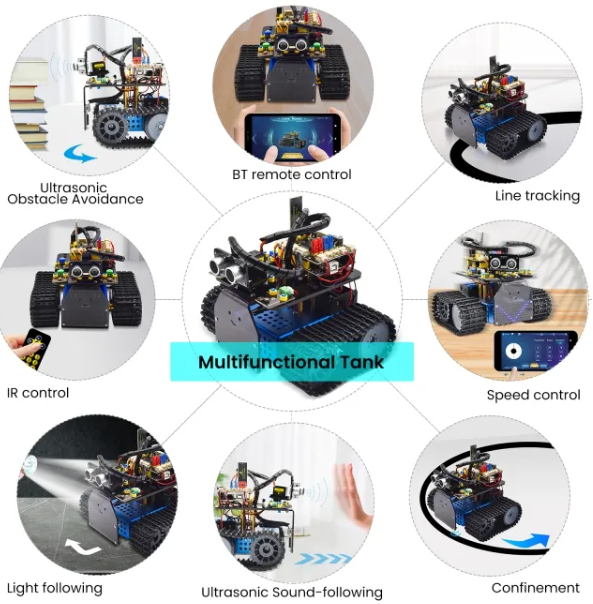
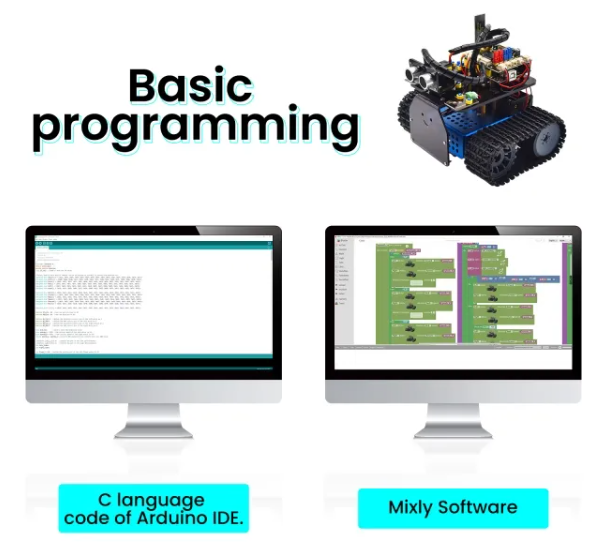
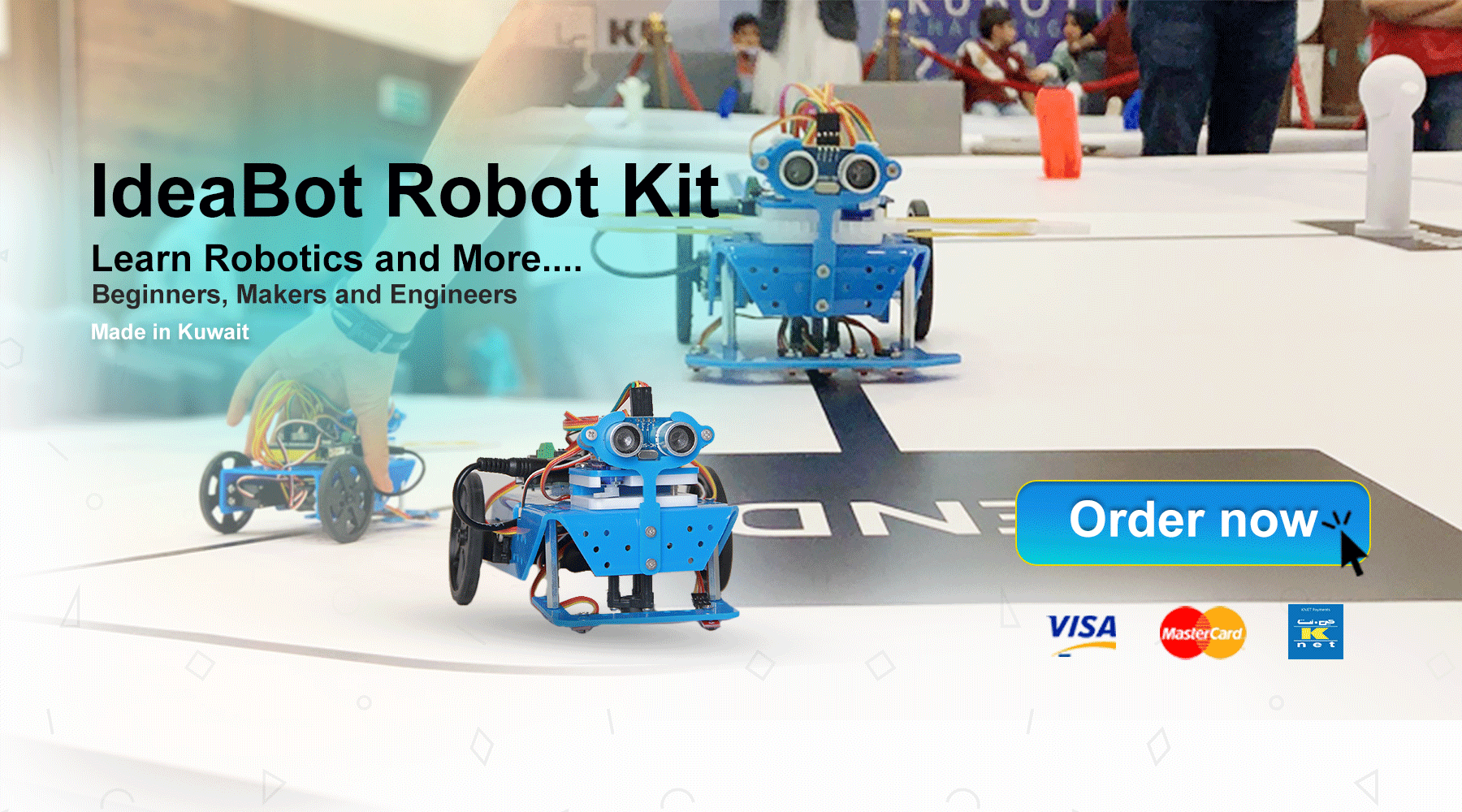
This robot helps you learn multiple robotics functions like light following, line tracking, IR and BT remote control, speed adjustment and so on. S...
View full details